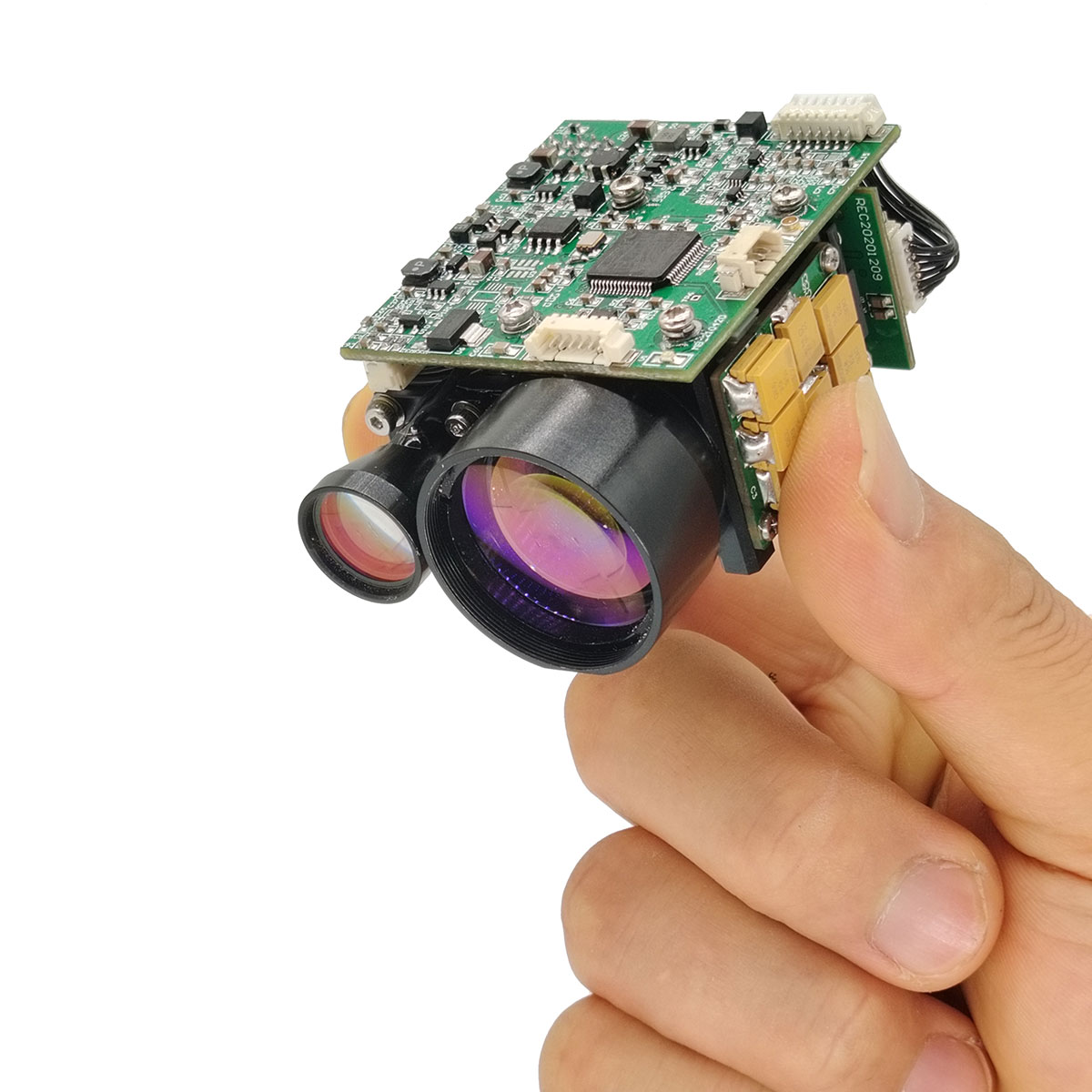
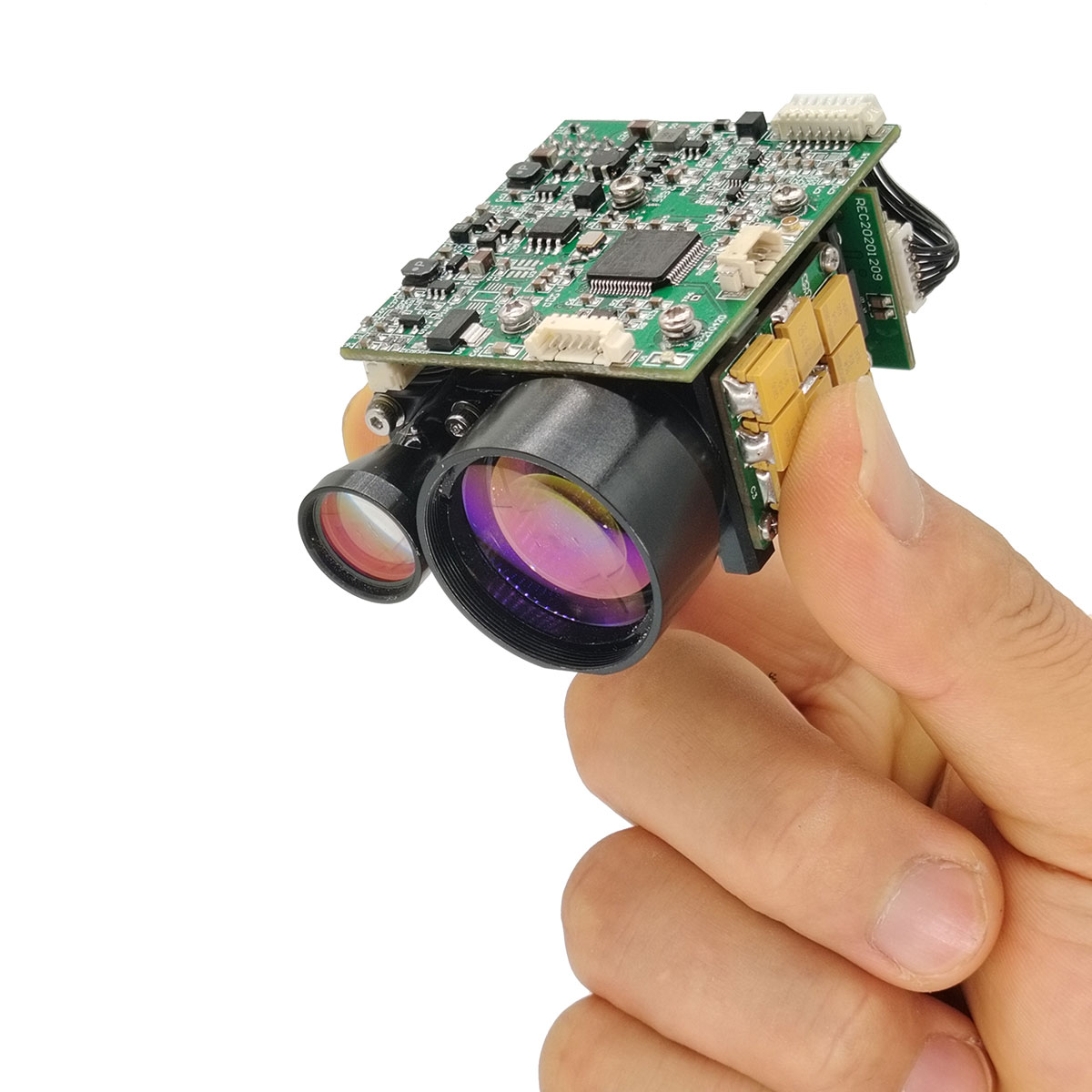
● As the professional manufacturer, we would like to provide you 20km Eye safety Laser Rangefinder Module. STA-C2030X laser rangefinder module adopts self-developed 1535nm erbium glass laser component, which has the features of long range, low power consumption, small size and human eye safety.
● Range performance: 20000m (NATO Target),30000m (Maximum range)
● Ranging accuracy ± 1m
● Measurement accuracy ≥ 98%
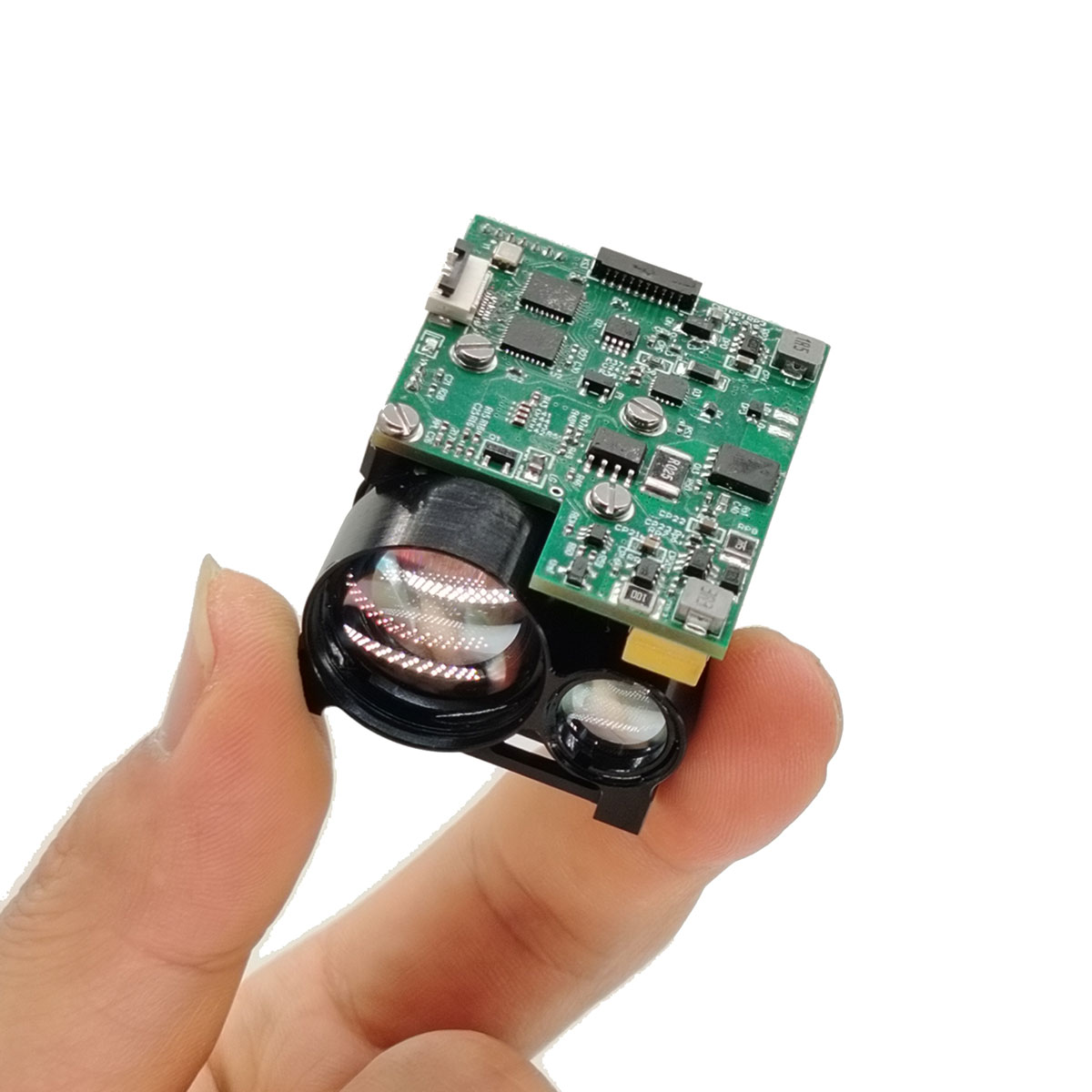
● Weight ≤ 380g
STA-C2030X 20km Eye safety Laser Rangefinder Module features a secure design, lightweight build, reduced power consumption, extended lifespan, and a broad temperature range. Widely employed in tasks such as reconnaissance, surveying, and mapping, this laser rangefinder module is devoid of a shell but provides a diverse range of interfaces for effortless integration into diverse systems. Users benefit from the convenience of PC software and communication protocols, enhancing usability for handheld devices and multifunctional systems.
Single shot ranging and continuous ranging
3-target detection, front and back target indication
Contain self-checking function
Wake-on-lan function
Number of emitted pulses during MNBF ≥1×106times
Handheld devices
Unmanned aerial vehicle
Electro-optical pod
Border surveillance
| Project | Performance Indicators | |
| Model | STA-C2030X | |
| Laser Wavelength | 1535±5nm | |
| Eye Safety | Class Ⅰ (IEC 60825-1) | |
| Divergence Angle | ≤0.3mrad | |
| Receiving Field of View (FOV) | ~ 1.8 mrad | |
| Launch Lens Diameter | Φ18mm | |
| Receiver Lens Diameter | Φ60mm | |
| Measuring Range (Reflectance 30%;visibility ≥28km) | MAX Ranging | ≥30000 m |
| Big Target | ≥23000 m | |
| NATO Target | ≥20000 m | |
| People(0.5m×1.7m) | ≥11000 m | |
| UAV(0.2x0.3m) | ≥4000 m | |
| Minimum Range | 50 m | |
| Ranging Frequency | 0.5~10Hz | |
| Ranging Accuracy | ±1 m | |
| Range Resolution | ≤30 m | |
| Precision Rate | ≥98% | |
| False Alarm Rate | ≤1% | |
| Number of multi-target detections | Up to 3 targets | |
| Electrical Interface | molex- 532610771 | |
| Supply Voltage | DC12 V | |
| Standby power consumption | ≤1.2W | |
| Average power consumption | ≤2 W | |
| Peak Power Consumption | ≤3W | |
| Weight | ≤380g | |
| Dimension (L×W×H) | 125mm×100mm×70mm | |
| Operating Temperature | -40~+70 ℃ | |
| Storage Temperature | -55~+75 ℃ | |
| Impact Resistance | 1200 g/1 ms( GJB150. 16A-2009) | |
| Anti-vibration | 5~50~5 Hz ,1 Octave range /min ,2.5 g | |
| Ranging Logic | First and last target, multi-target ranging, distance selectivity | |
| Activation Time | ≤950 ms | |
| Data Interface | RS422 | |
| Electrical isolation | Isolation of power ground, communication ground and structure ground | |
| Reliability | MTBF ≥ 1500h | |
| Optical axis stability | ≤0.05 mrad | |
| Non-parallelism between optical axis and mounting surface | ≤0.5 mrad | |
| Protection Class | IP67 | |
| ESD Class |
(Lens position) Contact discharge 6kV Air discharge 8kV |
|
| Electromagnetic Compatibility (EMC) | CE/FCC Certification | |
| Eco-friendly | RoHS2.0 | |

Electrical connector model: J30J; The corresponding plugs and cables shall be provided by Party B. The detailed definition of electrical interfaces is shown in the following table:
Table 1 Interface definition
| Pin | Definition |
| 1 | GND |
| 2 | GND |
| 3 | GND |
| 4 | VCC 12V |
| 5 | VCC 12V |
| 6 | RS422 RX+ |
| 7 | RS422 RX- |
| 8 | RS422 TX- |
| 9 | RS422 TX+ |
The data transmission between the rangefinder and the upper computer includes the following:
Control commands: including start distance measurement, continuous distance measurement, single distance measurement, query commands, etc.
Return data: including distance information, ambient temperature, rangefinder status, etc. The data exchange between the rangefinder and the upper computer adopts the 422 bus. The specific software communication protocol is as follows:
Communication format: RS422 communication, baud rate 115200bps;
Data format: 8-bit data, one start bit, one stop bit, without parity check. The data consists of a header byte, command part, data length, parameter part, and checksum byte;.
Communication method: The master control and rangefinder adopt a master-slave communication method. The master control sends control commands to the rangefinder, and the rangefinder receives and executes the commands. In the ranging state, the rangefinder sends back the data and status of the rangefinder to the upper computer according to the ranging cycle. The communication format and command content are shown in the table below.
Master sending
The format of the sent message is as follows:
| STX0 | CMD | LEN | DATA1H | DATA1L | CHK |
Send message format description
Table 2 Description of sending message format
| No. | Name | illustrate | Code | Remark |
| 1 | STX0 | Message start flag | 55(H) | |
| 2 | CMD | Command word | See table 3 | |
| 3 | LEN | Data length | The number of all bytes except the start flag, command word, and checksum | |
| 4 | DATAH | parameter | ||
| 5 | DATAL | |||
| 6 | CHK | XOR check | Except for the validation byte, other bytes are XORed |
The command is described as follows:
Table 3 Description of commands and data words sent by the main control to the distance measuring machine
| No. | Command word | Functions | Data byte | Remarks | Length | sample code (computing) |
| 1 | 0x00 |
Standby (continuous ranging stop) |
DATAH=00(H) DATAL=00(H) |
Distance measuring machine stops working |
6 bytes | 55 00 02 00 00 57 |
| 2 | 0x01 | Single ranging | DATAH=00(H) DATAL=00(H) | 6 Bytes | 55 01 02 00 00 56 | |
| 3 | 0x02 | Continuous ranging | DATAH=XX(H) DATAL=YY(H) |
DATA expresses the ranging period in ms. |
6 bytes | 55 02 02 03 E8 BE (1Hz ranging) |
| 4 | 0x03 | Self-test | DATAH=00(H) DATAL=00(H) | 6 Bytes | 55 03 02 00 00 54 | |
| 5 | 0x04 |
Distance selection and nearest distance setting |
DATAH=XX(H) DATAL=YY(H) |
DATA expresses the blind zone value, unit 1m |
6 Bytes | 55 04 02 00 64 37 (100m closest) |
| 6 | 0x06 |
Cumulative number of light out query |
DATAH=00(H) DATAL=00(H) |
Cumulative number of light out query |
6 bytes | 55 06 02 00 00 51 |
| 7 | 0x11 | APD power on | DATAH=00(H) DATAL=00(H) | 6 bytes | 55 11 02 00 00 46 | |
| 8 | 0x12 | APD power off | DATAH=00(H) DATAL=00(H) | 6 bytes | 55 12 02 00 00 45 | |
| 9 | 0xEB | Number Query | DATAH=00(H) DATAL=00(H) | 6 bytes | 55 EB 02 00 00 BC |
l Master receive format
The receive message format is as follows:
| STX0 | CMD | LEN | DATAn | DATA0 | CHK |
Table 4 Description of receive message format
| No. | Name | Description | Code | Remarks |
| 1 | STX0 | Message start flag 1 | 55(H) | |
| 2 | CMD_JG | Data command word | See Table 5 | |
| 3 | LEN | Data length | Number of all bytes except start flag, command word, and checksum | |
| 4 | Dn | Parameter | See Table 5 | |
| 5 | D0 | |||
| 6 | CHK | Checksum | All bytes except parity byte |
Master receive status description:
Table 5 Descri tion of the data word sent from the ran efinder to the master control
| No. | command word | Functions | Data byte | Remarks | Total length | ||
| 1 | 0x00 | Standby (continuous ranging stop) | D1=00(H) D0=00(H) | 6 bytes | |||
| 2 | 0x03 | Self-test | D7 ~D0 |
D0: char type, indicates APD temperature in degrees Celsius; D1: APD high-voltage value, unit V; D3-D2: blind value, unit 1m D5-D4: -5V voltage, unit 0.01V. D7-D6:+5V voltage, unit 0.01V |
12 bytes | ||
| 3 | 0x04 | Setting of the nearest distance to the opt-in, unit m | D1 D0 |
DATA expresses the closest distance value in 1m; First high then low |
6 bytes | ||
| 4 | 0x06 | Cumulative number of light out query | D3~D0 | DATA expresses the number of times the light is emitted, 4 bytes, the high byte comes first | 8 bytes | ||
| 5 | 0x11 | APD power on | DATAH=00(H) DATAL=00(H) | APD with high voltage | 6 Bytes | ||
| 6 | 0x12 | APD power off | DATAH=00(H) DATAL=00(H) | APD without high voltage | 6 Bytes | ||
| 7 | 0xED | Work timeout | 0x00 0x00 | The laser is in laser protection and cannot measure the distance. | 6 bytes | ||
| 8 | 0xEE | Validation error | 0x00 0x00 | 6 bytes | |||
| 9 | 0XEF | Serial communication timeout | 0x00 0x00 | 6 bytes | |||
| 10 | 0x01 | Single Distance Measurement |
D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 first target distance (unit 0. 1m) D5-D3 second target distance (data is 0 when single target) (unit 0. 1m) D2-D0 third target distance (data is 0 when single target) (unit 0. 1m) 3 target from near to far D9 (bit7-bit0) flag byte: D9 bit 7 indicates main wave; 1: with main wave, 0: without main wave. D9 bit 6 indicates return wave; 1: with return wave, 0: without return wave D9 bit 5 indicates the laser status; 1: laser normal, 0: laser failure D9 bit 4 timeout alarm; 1 normal, 0 timeout D9 bit 3 invalid, = 1 D9 bit 2 indicates APD status; 1: normal, 0: error D9 bit 1 indicates whether there is a former target; 1: target, 0: no target (the target before the main target is the former target) D9 bit 0 indicates whether there is an after- target; 1: with target, 0: without target (the target after the main target is the after-target) |
14 bytes | ||
| 11 | 0x02 | Continuous distance measurement |
D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 first target distance (unit 0. 1m) D5-D3 second target distance (data is 0 when single target) (unit 0. 1m) D2-D0 third target distance (data is 0 when single target) (unit 0. 1m) 3 target from near to far D9 (bit7-bit0) flag byte: D9 bit 7 indicates main wave; 1: with main wave, 0: without main wave. D9 bit 6 indicates return wave; 1: with return wave, 0: without return wave D9 bit 5 indicates the laser status; 1: laser normal, 0: laser failure D9 bit 4 timeout alarm; 1 normal, 0 timeout D9 bit 3 invalid, = 1 D9 bit 2 indicates APD status; 1: normal, 0: error D9 bit 1 indicates whether there is a former target; 1: target, 0: no target (the target before the main target is the former target) D9 bit 0 indicates whether there is an after- target; 1: with target, 0: without target (the target after the main target is the after-target) |
14 bytes | ||
| 14 | 0xEB | Number Search | D16 … … D0 |
D15 D12 Complete model D11 D10 Product number D9 D6 Software version D5 D4 APD number D3 D2 Laser number D1 D0 FPGA version |
20 bytes | ||
| Remarks: ① Undefined data byte/bit, default is 0; | |||||||
For more information on our products, please contact Jioptik.